17 KiB
如何使用 TencentOS-tiny 上移植的 MicroPython 组件
1 基础Keil工程
1.1 源代码
-
micropython/py 组中添加
- components/language/micropython/py 目录下的 *.c 文件
-
micropython/shared 组中添加:
- components/language/micropython/shared/readline 目录下的 readline.c 文件
- components/language/micropython/shared/runtime 目录下的 pyexec.c, stdout_helpers.c, sys_stdio_mphal.c, interrupt_char.c 文件
-
micropython/extmod 组中添加:
- components/language/micropython/extmod 目录下的 utime_mphal.c, machine_signal.c, virtpin.c, machine_mem.c 文件
-
micropython/port 组中添加:
- components/language/micropython/port 目录下的 *.c 文件
- components/language/micropython/port/modules 目录下的 *.c 文件
- 工程目录中 board/ 目录下的 mphalboard.c 文件
-
hal 组中添加:
-
工程目录下 board/hal/ 目录下的 *.c 文件
-
examples 组中添加:
-
examples/micropython_demo/micropython_demo.c文件
1.2 头文件
在工程配置界面 C/C++ 页面中的 Include Paths 中添加下列目录:

- 添加 examples/micropython_demo
- 添加 components/language/micropython
- 添加 components/language/micropython/port
- 添加 components/language/micropython/port/modules
- 添加工程目录
- 添加工程目录下的 board 目录
- 添加工程目录下的 board/hal 目录
1.3 其他选项
在工程配置界面的 C/C++ 页面下勾选 GNU extensions 选项,并在 Define 中添加 USE_MICROPYTHON。

1.4 编译脚本
MicroPython 采用了字符串驻留(String interning)技术节省 ROM 和 RAM 空间,在工程编译前需要先生成内部字符串 QSTR(uniQue STRing)。本工程中采用 Makefile 搜索代码中所有需要预先生成的 QSTR,然后在工程目录下的 genhdr 目录中生成 qstrdefs.generated.h 等文件。关于QSTR的更详细信息,可以在官方文档中获取。
在工程配置界面 User 页面下的 Before Build/Rebuild 中添加以下两个命令:
cmd.exe /C cd $P..\..\..\..\components\language\micropython\port & make clean-build V=1
cmd.exe /C cd $P..\..\..\..\components\language\micropython\port & make genhdr V=1 PYTHON=python PORT_BOARD_DIR=$Pboard TARGET_GENHDR_DIR=$Pgenhdr

该命令的作用是生成工程目录下的 genhdr 目录中的头文件,这些头文件通常只有在修改配置之后才需要重新生成,因此在不修改配置的情况下,不需要勾选这两个命令。
使用前请确保安装了make等unix工具,gcc工具链以及Python3,并将它们加入到系统环境变量中。如果没有安装,gcc工具链和unix命令行工具可以在MinGW中获取。访问MinGW官方网站和Python官方网站分别可以获取MinGW和Python的相关信息。
第二条命令中指定了多个变量的值,这些变量的含义分别是:
- PYTHON:表示命令行可以使用的python命令,根据当前环境中的python命令修改
- PORT_BOARD_DIR:表示与开发板相关的代码目录,该目录下至少需要包含mpconfigboard.h 文件和 mphalboard.h 文件
- TARGET_GENHDR_DIR:表示生成的头文件所在的代码目录
1.5 外部Flash扩展
该功能目前只能在小熊派开发板上使用
MicroPython对ROM的需求量较大,上述基础Keil工程编译后需要占用239.70kB的ROM空间,对于包括ROM空间较少的开发板(比如:小熊派开发板)不太友好,为了能够在这样的开发板上运行更加完整的MicroPython功能,可以利用开发板的外部Flash对ROM空间进行扩展。
-
micropython_extra_demo 工程目录下包含了小熊派开发板的Keil外部Flash下载算法文件 BearPi_W25Q64JV.FLM,将该文件拷贝到 <Keil软件目录>/ARM/Flash 目录下。
-
在Keil工程中配置外部 ROM,并选择 Flash 下载算法
-
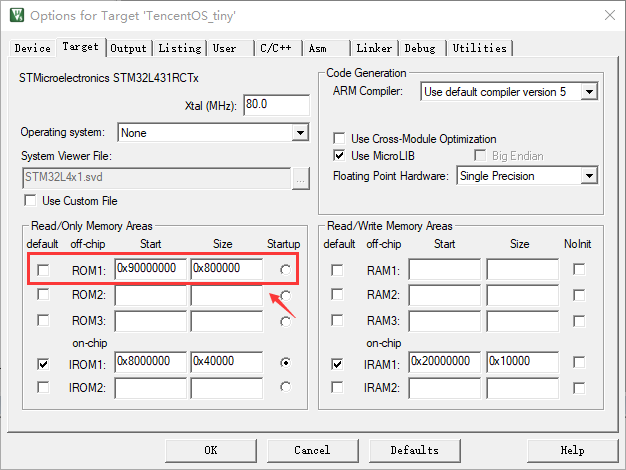
在工程配置的 Target 页面中,添加一个 ROM 区域,起始地址为 0x90000000,区域大小为 0x800000(ROM区域大小取决于外部 Flash 芯片容量)
-
在 Debug 页面中,点击右上角的 Settings,选择 Flash Download 选项卡,进入下图界面

-
添加描述为**“BearPi W25Q84JV 8MB Flash”的 Flash 下载算法,并将右上角的 Size 调整到0x8000**。
-
-
将特定文件或者组的存储位置改到外部 ROM 中。

-
添加 W25Q64JV 的驱动代码,启用内存映射模式。(在 MicroPython 的工程中,只需要启用第二节 “功能配置和扩展” 中的
MP_USING_QSPI_FLASH宏并添加相应文件即可)



中断相关的代码以及内存映射模式启动前就需要执行的代码,不能放在外部 Flash 中。推荐将 MicroPython 相关的代码(除了移植的代码)都放在外部 Flash 中。
2 功能配置和扩展
与开发板相关的配置文件主要包括 mpconfigboard.h 和 mphalboard.h/c,其中 mpconfigboard.h 包含对 MicroPython 的配置,mphalboard.h/c 包含开发板特有的 MicroPython 函数的部分功能实现。
mpconfigboard.h 主要由宏定义构成,可以使用的定义以及对应的含义如下表:
| 名称 | 含义 | 取值范围 | 说明 |
|---|---|---|---|
| MICROPY_HW_BOARD_NAME | 开发板名称 | 字符串 | |
| MICROPY_HW_MCU_NAME | 微控制器名称 | 字符串 | |
| MICROPY_HW_UART_NUM | UART数量 | 整数 | 需要与 tos_hal 的实现一致 |
| MICROPY_HW_UART_REPL | 用于 MicroPython 交互式命令行的 UART 的编号 | 整数 | 需要与 tos_hal 的实现一致 |
| MICROPY_HW_SPI_NUM | SPI 数量 | 整数 | 需要与 tos_hal 的实现一致 |
| MICROPY_CONFIG_ROM_LEVEL | ROM 水平 | MICROPY_CONFIG_ROM_LEVEL _<BASIC/EXTRA>_FEATURES |
代表 MicroPython 的功能裁剪程度,这里只列出两个典型值,其他取值需要参考 py/mpconfig.h 文件 |
除了以上配置之外,还有一些可选的功能配置,采用定义MP_USING_xxx宏的形式进行功能扩展:
| 宏定义 | 描述 | 依赖的文件/组件 |
|---|---|---|
| MP_USING_QSPI_FLASH | 使用外部QSPI-Flash扩展内部ROM空间 | 开发板目录/BSP/Hardware/W25Qxx-QSPI/w25qxx.c,详见第一节的外部Flash扩展部分 |
| MP_USING_VFS | 启用uos模块,启用VFS功能 | tos_vfs组件, extmod/vfs.c, extmod/vfs_reader.c, extmod/moduos.c |
| MP_USING_MACHINE_SPI | 在umachine库中启用SPI功能 | extmod/machine_spi.c, drivers/bus/softspi.c, |
| MP_USING_MACHINE_I2C | 在umachine库中启用I2C功能 | extmod/machine_i2c.c |
| MP_USING_NETWORK | 启用network模块 | socket_wrapper组件, sal_wrapper组件, extmod/modnetwork.c, extmod/modusocket.c, shared/netutils/netutils.c |
| MP_USING_USELECT | 启用uselect模块 | extmod/moduselect.c |
| 以下模块在ROM_LEVEL为EXTRA的时候会默认启用 | ----- | ----- |
| MP_USING_CMATH | 启用cmath模块 | - |
| MP_USING_UASYNCIO | 启用uasyncio模块 | extmod/moduasyncio.c |
| MP_USING_UCTYPES | 启用uctypes模块 | extmod/moductypes.c |
| MP_USING_UZLIBS | 启用uzlibs模块 | extmod/moduzlibs.c |
| MP_USING_UJSON | 启用ujson模块 | extmod/modujson.c |
| MP_USING_URE | 启用ure模块 | extmod/modure.c |
| MP_USING_HEAPQ | 启用uheapq模块 | extmod/moduheapq.c |
| MP_USING_UHASHLIB | 启用uhashlib模块 | extmod/moduhashlib.c |
| MP_USING_UBINASCII | 启用ubinascii模块 | extmod/modubinascii.c |
| MP_USING_URANDOM | 启用urandom模块 | extmod/modurandom.c |
| MP_USING_FRAMEBUF | 启用framebuf模块 | extmod/modframebuf.c |
3 使用MicroPython
下载 MicroPython 固件后,可以使用支持串口功能的 shell 连接到 MicroPython 的交互式解释器(REPL)上,也可以使用 MicroPython 提供的 mpremote 工具连接到 REPL。REPL 所关联的串口由第二节 “功能配置和扩展” 中的 MICROPY_HW_UART_REPL 宏设定。
3.1 mpremote
3.1.1 使用 pip 安装 mpremote
pip install mpremote
3.1.2 使用 mpremote 可以在常规的 shell 上连接到串口 REPL
mpremote connect <device>
例如:连接COM14端口
mpremote connect COM14
按下 ”Ctrl-]“ 可以退出REPL
3.1.3 使用 mpremote 还可以在开发板上执行本地的 python 脚本
mpremote connect <device> run <file>
例如:使用mpremote运行示例脚本led.py文件
mpremote connect COM14 run ./led.py
mpremote还包含其他功能,参考官方文档了解详情。
3.2 REPL
3.2.1 help() 命令
进入 REPL 后,可以使用 help() 命令,查看与 MicroPython 控制命令相关的提示信息:
.png)
其中 Ctrl-C 可以用来中断正在运行的程序,Ctrl-D 可以用来软复位,Ctrl-E 可以进入粘贴模式。
3.2.2 help('modules') 命令
在交互式解释器中可以使用 help('modules') 命令查看当前可以引入的模块:
.png)
3.2.3 粘贴模式
在正常交互模式下,输入 Ctrl-E 可以进入粘贴模式。
在粘贴模式下可以方便地将 python 脚本粘贴到 REPL 中。
由于输入缓冲区大小只有512B,所以比较长的脚本需要分段粘贴。
粘贴完成后,输入 Ctrl-D 可以退出粘贴模式,并开始执行脚本。
下图展示了使用粘贴模式粘贴 pin.py 脚本的情况:

3.2.4 其他功能
REPL还有自动缩进,自动补全以及特殊变量"_"等功能,详细内容可以参考官方文档。
3.3 自动执行脚本
对于启用文件系统的 MicroPython 工程,可以在文件系统根目录中存放 boot.py 和 main.py 脚本,这两个脚本会在 MicroPython 启动时依次执行。
4 示例工程和示例脚本说明
4.1 示例工程
项目针对小熊派开发板提供了两个不同的示例工程:
- micropython_basic_demo 是一个基础版的 MicroPython 工程,在第一节 ”基础Keil工程“ 中给出了比较详细的该工程的创建流程。该工程包含了 MicroPython 的REPL功能、_thread线程模块功能以及基本的 machine 模块功能。
- micropython_extra_demo 是在 micropython_basic_demo 工程的基础上,参考第二节 “功能配置和扩展” 中的内容进行配置得到的扩展版的 MicroPython 工程。由于小熊派开发板的 ROM 不足以支持所有的 MicroPython 功能,该工程内使用了外部 Flash 扩展 ROM 容量。该工程在 micropython_basic_demo 工程的基础上,添加了 MicroPython 的一系列扩展模块,还添加了uos 模块以及 network 模块等移植模块。
4.2 示例脚本
在工程目录下的 scripts 目录中给出了三个示例脚本文件:
-
pin.py:脚本展示了 umachine 模块和 utime 模块的使用方式
import umachine as machine import utime as time running = True def key1_irq_callback(pin): if pin.value() == 0: print('Key1 is pressed') else: print('Key1 is released') def key2_irq_callback(pin): global running running = False if __name__ == '__main__': led = machine.Pin("LED", mode=machine.Pin.OUT) key1 = machine.Pin("KEY1", mode=machine.Pin.IN_PULLUP) key1.irq(trigger=machine.Pin.IRQ_RISING|machine.Pin.IRQ_FALLING, handler=key1_irq_callback) key2 = machine.Pin("KEY2", mode=machine.Pin.IN_PULLUP) key2.irq(trigger=machine.Pin.IRQ_FALLING, handler=key2_irq_callback) while running: led.on() time.sleep(0.5) led.off() time.sleep(0.5)脚本运行现象是:LED每过0.5s亮灭变化一次;按下按键1,打印一行文本 ”key1 is pressed“,释放按键1,打印一行文本 ”key1 is released“;按下按键2,LED不再闪烁,脚本退出。
-
thread.py:脚本展示了 _thread 模块的使用方法
import _thread lock = _thread.allocate_lock() n_thread = 4 n_finished = 0 def thread_entry(no): print(no) with lock: global n_finished n_finished += 1 if __name__ == '__main__': for i in range(n_thread): _thread.start_new_thread(thread_entry, (i,)) while n_finished < n_thread: pass print("done")脚本运行现象是:创建四个线程,序号分别为0~3,每个线程打印自己的序号后退出。
-
os.py:该脚本展示了 uos 模块中的文件操作和目录操作
该脚本只有在启用 VFS 的前提下才能运行
import uos as os # test mkdir() print('{:-^40}'.format('test mkdir')) print(os.listdir()) os.mkdir('test_dir') print(os.listdir()) # test file open() and write() print('{:-^40}'.format('test write')) f = open('test_dir/test_file', 'w') f.write("Hello TencentOS-tiny\n") print("Hello MicroPython", file=f) f.close() print(os.listdir('test_dir')) # test file open() and read() print('{:-^40}'.format('test read')) f = open('test_dir/test_file', 'r') print(f.readlines()) f.close() # test 'with' statement and iterator print('{:-^40}'.format('test with statement')) with open('test_dir/test_file', 'r') as file: for line in file: print(line) # test rename() print('{:-^40}'.format('test rename')) os.rename('test_dir', 'test_dir2') print(os.listdir()) print(os.listdir('test_dir2')) # test unlink() print('{:-^40}'.format('test unlink')) os.unlink('test_dir2/test_file') print(os.listdir('test_dir2')) os.unlink('test_dir2') print(os.listdir())脚本运行现象是:输出以下内容
---------------test mkdir--------------- ['System Volume Information'] ['test_dir', 'System Volume Information'] ---------------test write--------------- ['test_file'] ---------------test read---------------- ['Hello TencentOS-tiny\n', 'Hello MicroPython\n'] ----------test with statement----------- Hello TencentOS-tiny Hello MicroPython --------------test rename--------------- ['System Volume Information', 'test_dir2'] ['test_file'] --------------test unlink--------------- []
['System Volume Information']